
 한국의
한국의









영구 자석 동기식 모터
영구 자석 동기 모터 (PMSM)의 주요 차이점 유도 모터가 회 전자에 있습니다. 연구 1 pmsm Ang. 능률 약 2 % 더하 고효율 (IE3) 유도 전기 모터는 고정자가 동일한 디자인을 갖는 것으로 제공되며 동일한 가변 주파수 드라이브 컨트롤에 사용됩니다. 이 경우 다른 전기 모터와 비교하여 영구 자석 동기 전기 모터가 최상의 성능이 있습니다 : 동력 / 양, 토크 / 관성 등
영구 자석 동기식 모터 회전 전기 모터, 회 전자와 고정자로 구성됩니다. 고정자는 고정 된 부분입니다. 로터는 회전 부분입니다.
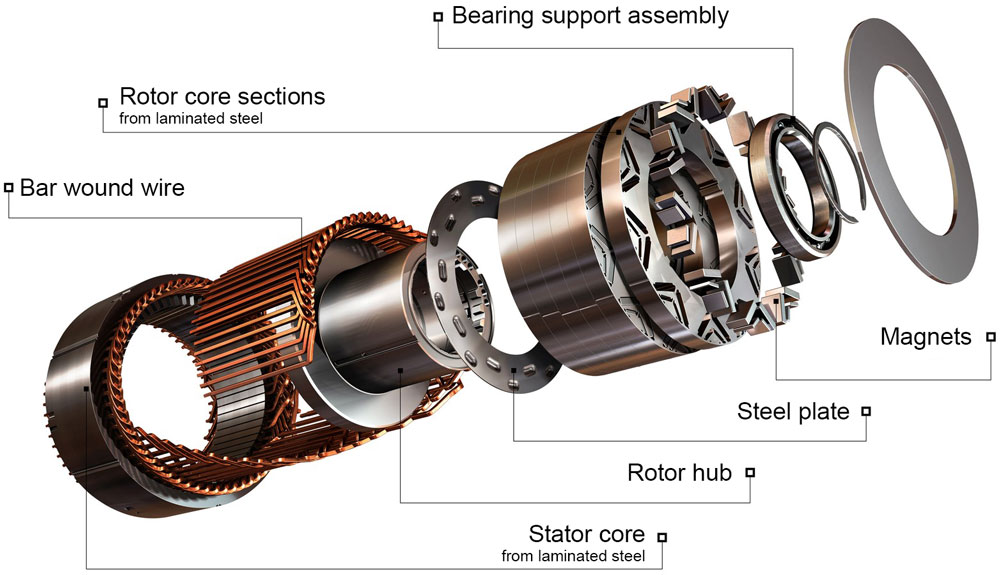
전형적으로, 로터는 전기 모터의 고정자 내부에 위치하여 외부 로터가있는 구조도 있습니다 - 내부 전기 모터.
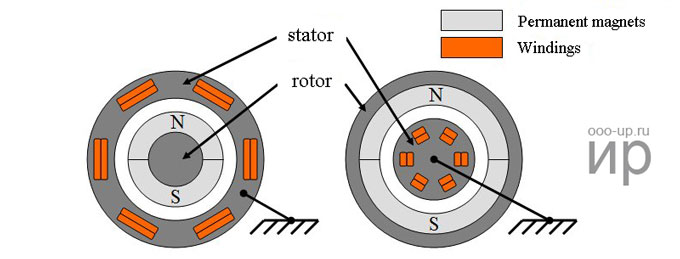
그만큼 축차영구적 인 자석으로 구성됩니다. 높은 강제력이있는 재료는 영구적 인 자석으로 사용됩니다.
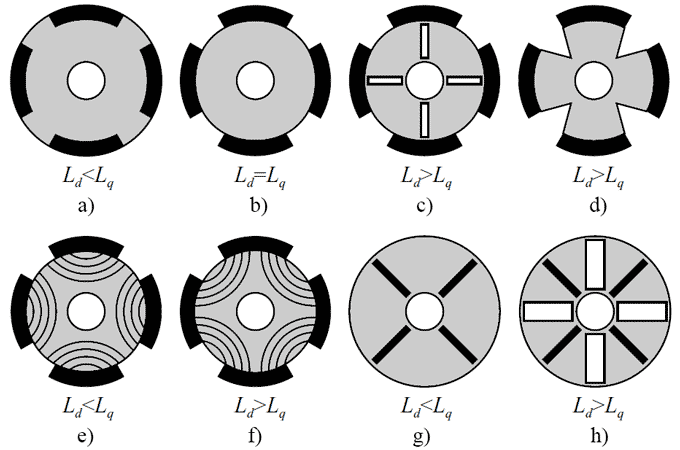
비 현저한 전기 모터 폴 로터는 동등한 직접 및 직교 인덕턴스 L이 있습니다. 디 = 엘 큐 , 반면 현저한 극 회 전자가있는 전기 모터의 경우 직교 인덕턴스는 직접 L과 동일하지 않습니다. 큐 ≠ 엘 디 . .
그만큼 고정자외부 프레임과 권선이있는 코어로 구성됩니다. 두 및 3 상 와인딩.
분포슬롯의 수를 묶는 그러한 권선을 호출하십시오. 극 및 위상 q = 2, 3, ...., K.
집중된 그런 권선이라고 불리는데, 슬롯 수 극 및 위상 q = 1. 이 경우, 슬롯은 고정자의 원주 주위에 고르게 이격되어 있습니다. 권선을 형성하는 두 개의 코일은 직렬 및 평행하게 연결될 수 있습니다. 그러한 권선의 주요 단점은 EMF 곡선의 형태에 영향을 미치는 것은 불가능합니다. [2] . .
도체 내의 EMF 곡선의 형태는 고정자 원주 주위의 갭의 자기 유도의 분포 곡선에 의해 결정된다.
회 전자의 부적절한 극 아래의 갭의 자기 유도가 사다리꼴 형상을 갖는 것으로 알려져있다. 도체에 유도 된 EMF는 동일한 양식을 가지고 있습니다. IF 정현파 EMF를 만들어야 할 필요가 있으며, 극 팁은 유도 분포 곡선이 유도 분포 곡선을 주어줍니다. 근접 정현파. 이 로터의 극 팁의 베벨에 의해 촉진된다. [2] . .
그만큼 동기식 모터의 작동 원리 고정자의 회전 자기장과 회 전자의 일정한 자기장의 상호 작용을 기반으로합니다. 그만큼 회전 자기 필드의 개념 동기식 모터의 고정자 중에는 3 상 유도 모터 . .
동기 모터의 작동 원리는의 상호 작용을 기반으로합니다. 회전 자기장고정자와 회 전자의 일정한 자기장의
ampere 's Ampere's Ampere의 자계의 동기 교류 전류와 상호 작용하는 회 전자의 자기장 법, 창조 토크, 로터를 회전 시키도록 강요 ( 더 ).
PMSM의 로터에있는 영구 자석 일정한 자기 필드를 만듭니다. 고정자 필드로 회 전자의 회전의 동기 속도에서, 회 전자 극은 고정자의 회전 자기장과 연동된다. 이와 관련하여, PMSM 할 수 없음 시작 자체 언제 그것은 3 상에 직접 연결됩니다. 현재 네트워크 (전원 그리드의 현재 50Hz)
영구 자석 동기 모터는 제어 시스템, 예를 들어, 가변 주파수 드라이브또는 서보 드라이브. 제어 시스템이 구현 된 많은 수의 제어 기술이 있습니다. 최적의 제어 방법의 선택은 주로 전기 드라이브 앞에있는 작업에 달려 있습니다. 영구 자석 동기 모터를 제어하는 주요 방법은 아래의 표에 나와 있습니다.
| 제어 | 장점 | 단점 | |||
|---|---|---|---|---|---|
| 스칼라 | 간단한 제어 체계 | 제어가 최적이 아닙니다. 작업에 적합하지 않음 어디서 가변적 인 하중, 통제 손실이 가능합니다 | |||
| 위치 센서가 있습니다 | 회 전자 위치 및 모터 회전 속도, 대형 제어 범위의 부드럽고 정확한 설정 | 회 전자 위치 센서와 강력한 마이크로 컨트롤러가 필요합니다 제어 시스템 내부 | |||
| 없음 위치 센서 | 회 전자 위치 센서 없음 필요합니다. 로터 위치 및 모터 회전 속도, 대형 제어 범위의 부드럽고 정확한 설정은 위치 센서가 있습니다 | 센서리스 필드 지향 제어 전체 속도 범위 PMSM 만 가능합니다 Salient Pole Rotor를 사용하면 강력한 제어 시스템이 필요합니다. | |||
| 직접 토크 제어 | 간단한 제어 회로, 양호한 동적 성능, 넓은 제어 범위, 회 전자 위치 센서 필요 없음 | 높은 토크와 현재의 리플 | |||
| 개방 루프 | 간단한 제어 체계 | 제어가 최적이 아닙니다. 작업에 적합하지 않음 어디서 가변적 인 하중, 통제 손실이 가능합니다 | |||
| 위치 센서 (홀 센서) | 간단한 제어 체계 | 홀 센서 필요합니다. 토크 잔물결이 있습니다. 그것은 PMSM을 제어하기위한 것입니다 사다리꼴 백 EMF와 함께 언제 제어 PMSM 정현파 백 EMF를 사용하면 평균 토크가 5 %만큼 낮습니다. | |||
| 없음 감지기 | 보다 강력한 제어 시스템이 필요합니다 | 저속 작동에 적합하지 않습니다. 토크 잔물결이 있습니다. 그것은 PMSM을 제어하기위한 것입니다 사다리꼴 백 EMF와 함께 언제 제어 PMSM 정현파 백 EMF를 사용하면 평균 토크가 5 %만큼 낮습니다. | |||
to 단순한 작업을 해결하는 것은 일반적으로 홀 센서가있는 사다리꼴 제어가 사용됩니다 (예 : 컴퓨터 팬) to 전기 드라이브에서 최대 성능이 필요한 문제 해결 필드 지향 통제는 대개 선택됩니다.
영구 자석 동기 모터의 가장 간단한 제어 방법 중 하나는 - 사다리꼴 제어. 사다리꼴 제어는 PMSM 사다리꼴 백 EMF. 동시에이 방법을 사용하여 PMSM 정현파 백 (Sinusoidal Back EMF)으로 전기 드라이브의 평균 토크는 5 % 낮아지며 토크 잔물결은 14 % 최대 값. 로터의 피드백과 피드백이없는 사다리꼴 제어가 있습니다.
그만큼 열린 루프 제어 (없는 피드백) 최적이 아니며 PMSM의 출시로 이어질 수 있습니다 동기해도, 즉, 제어 성의 상실.
3상의 회 전자 위치 센서로서 사다리꼴 제어, 전기 모터에 내장 된 3 개의 홀 센서가 일반적으로 사용되며, 이는 정확도가있는 각도를 결정할 수 있습니다. ± 30 학위. 이 제어로, 고정자 전류 벡터는 출력시 리플 토크가있는 리플 토크가있는 결과로 한 전기 기간 동안 6 개의 위치 만 취합니다.

현장 지향 제어 (FOC) 속도와 독립적으로 원활하게, 정확하고 독립적으로 제어 할 수 있습니다. 토크 브러시리스 모터. 위해 필드 지향 제어 알고리즘의 작동은 브러시리스의 회 전자의 위치를 알아야합니다. 모터.

이후로 1970 년대 센서리스 브러시리스 벡터 제어 방법 ac. 모터 마이크로 프로세서의 급속한 발달 덕분에 개발되기 시작했습니다. 첫 번째 센서리스 각도를 추정하는 방법은 전기 모터의 특성을 기반으로하여 EMF 회전. 모터 백 EMF는 고정 좌표계에서 백 EMF의 값을 계산하여 회 전자의 위치를 계산하여 회 전자의 위치를 계산할 수 있습니다. 그러나 언제 로터가 회전하지 않고, 백 EMF가없고, 저속에서 백 EMF는 소음과 구별하기가 어렵습니다. 따라서이 방법은 저하로 모터 로터의 위치를 결정하는 데 적합하지 않습니다. ..

현재, 센서가없는 현장 지향 PMSM의 제어 완전한 속도 범위에서는 Salient Pole Rotor가있는 모터에 대해서만 가능합니다.
위해 우리의 제품이나 가격등에 대한 문의, 우리에게 두십시오. 우리는 24 시간 이내에 연락 할 것입니다.





 전화로 전화하십시오 :
전화로 전화하십시오 :
전화 : +8613860661520
 이메일을 보내주십시오 :
이메일을 보내주십시오 :
이메일 : ivy@tech-zy.com
 주소 :
주소 :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© 저작권: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd 판권 소유.

IPv6 네트워크 지원






